Functional Safety - Robots
Frequently asked questions about ANSI/CSA 22.2 No. 336 for robotic engineers
Stopping distances and speed limits
The various clauses relating to speed and stopping distance are summarized on the chart below. CSA 336 defines two regions of interest “open space” and “confined space”. The chart below shows the two speed limits and the speed dependent stopping distance while automated.
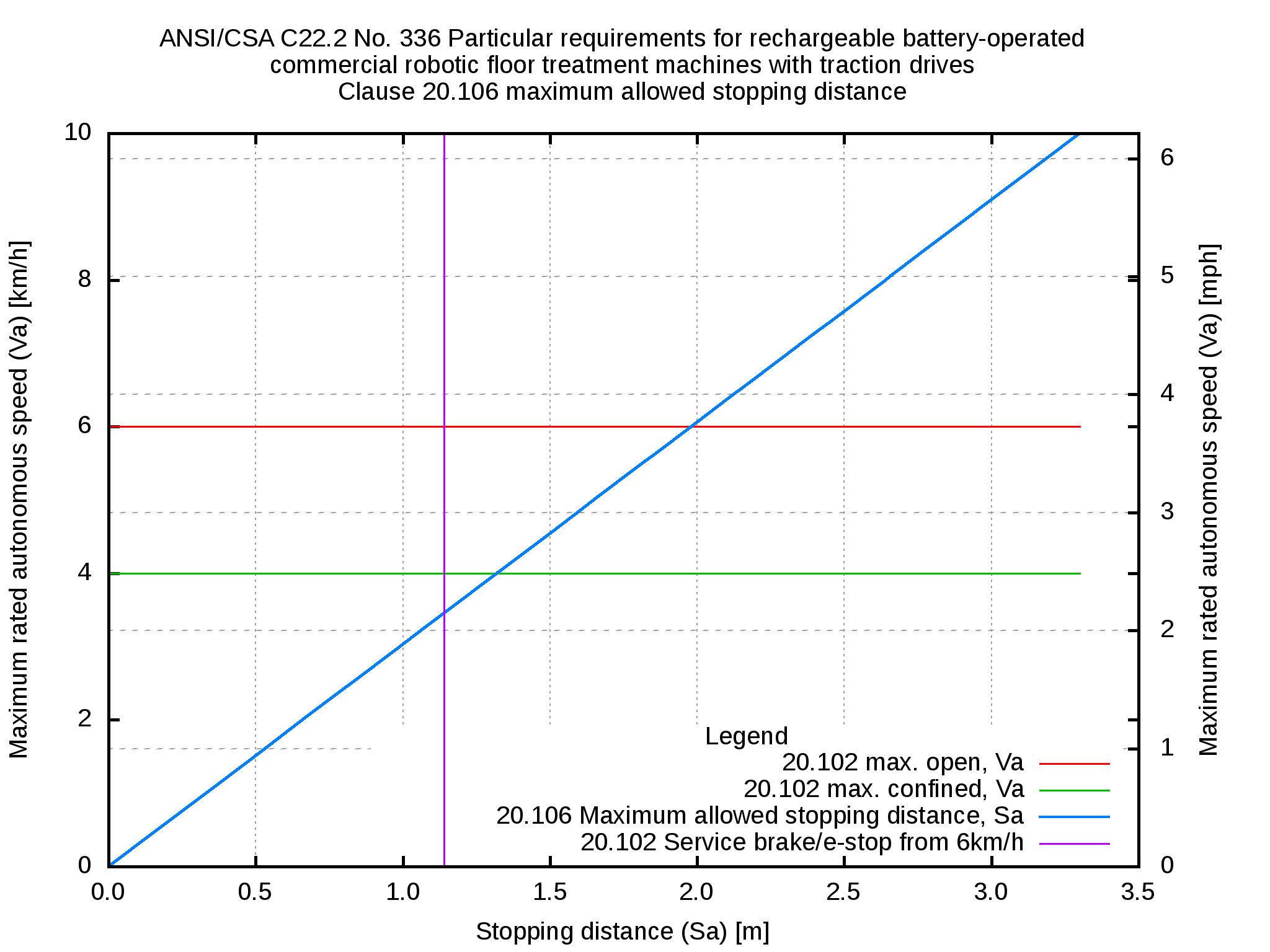
Method 2 proposed at IEC SJ61J meeting at VDMA in Frankfurt February 15, 2018
To calculate the distance Sa two methods have been examined. Source data for these data are shown below using the calculation in CSA 336-17 and a proposed alternative method taking care to ensure the units used in the equations are balanced. Converting speed from km/h into m/s and then using a different factor 0.33 to 1.184 makes no difference to the maximum allowable stopping distance.

The conversion from km/h into m/s is as follows:

Obstacle detection
Without referring to ANSI B56.5 Safety Standard for Driverless, Automatic Guided Industrial Vehicles and Automated Functions of Manned Industrial Vehicles CSA 336 defines two test obstacles that are very similar to the Test Pieces specified in section 8.11.1.2.1. ANSI B56.5 is available free of charge from the Industrial Truck Standards Development Foundation after free registration. Clause 20.107 of CSA specifies the requirements for detecting these test obstacles. Clause 20.108 defines requirements for dealing with edges. Requirements for stopping due to obstacles are specified in clauses 20.111, 20.112 and 20.113.
Starting, restarting and resetting
Clauses 20.101, 20.110 and 20.111 have requirements for switch off, initial start-up and restarting after stopping or contacting obstacles. These functions are all defined as safety-critical functions so subject to achieving the minimum safety integrity levels for functional safety.
External links (valid January 2018)
|
# |
Reference |
Link |
|
1 |
CSA/ANSI C22.2 NO. 336-17 - Particular requirements for rechargeable battery-operated commercial robotic floor treatment machines with traction drives |
http://shop.csa.ca/en/canada/appliances/csaansi-c222-no-336-17/invt/27043752017 |
|
2 |
CSA Group Store |
|
|
3 |
ANSI/ITSDF B56.5 - 2012, Safety Standard for Driverless, Automatic Guided Industrial Vehicles and Automated Functions of Manned Industrial Vehicles EFFECTIVE 03/01/13 |
http://www.itsdf.org/forms/regusers/standards/12_ITSDF-B56-5-2012-rev-03-07-14.pdf |